Biobot
Ekipa strokovnjakov skupaj z avtorjem goji maščobne celice, spremenjene v nevronske, na ploščici z elektrodami (MEA). Nevroni s svojimi električnimi signali podobno kot možgani na čipu sprožajo premikanje robota v prostoru. Preko občutljivega in zapletenega sistema zaznavanja in programiranja se signal iz nevronov pretvori iz analognega v digitalnega. Nato se ojača in uporabi za iskanje najprimernejše oblike bota ter za njegovo gibanje.
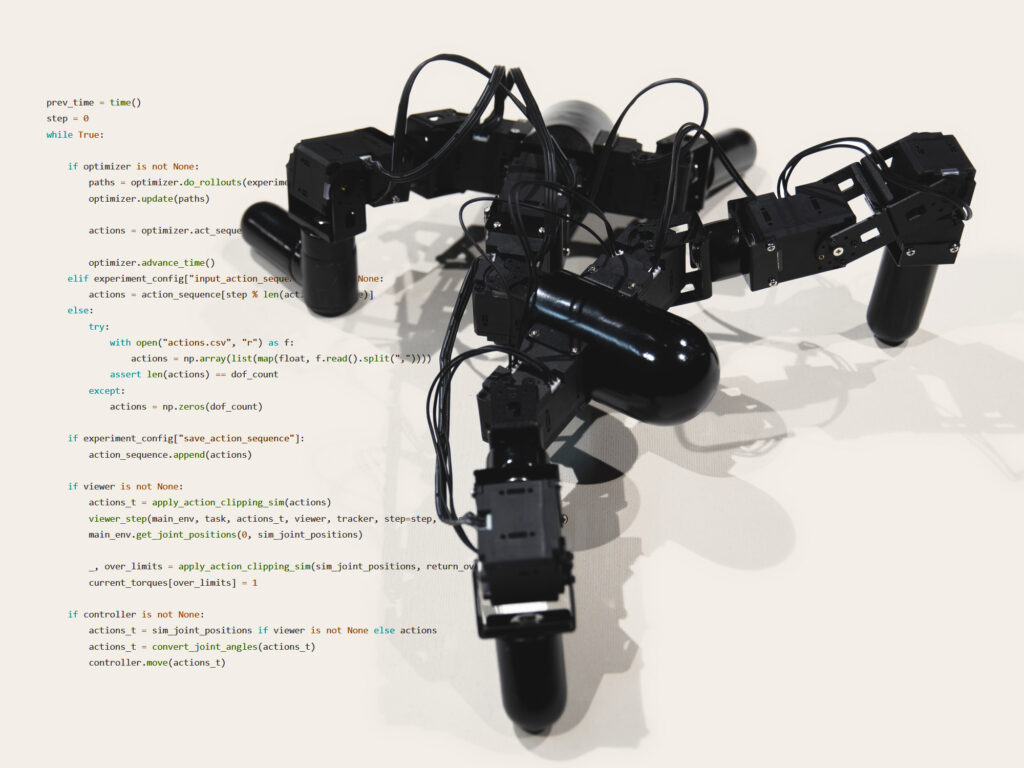
Za določanje oblike Biobota program umetne inteligence uporabi izhodne signale iz nevronov in jih primerja z možnimi gibi nog v knjižnici gibov različnih členonožcev. Iz teh sopostavitev AI sklepa o primerni količini sklepov in okončin ter za premikanje predlaga najbolj optimalno skeletno konstitucijo. Rezultati se kažejo v oblikah nepredvidljivih zoomorfnih teles, ki jih je AI ponudil glede na možnosti premikanja, umetnik pa izbral v skladu s svojim interesom za hendikepirano gibanje. Algoritmično iskanje oblike bota glede na stimulirano biološko aktivnost se s pomočjo iteracij signalov iz možganskega organela kaže kot nenadzorovan evolucijski proces. Pred nami se razpirajo možnosti hibridne bio-kibernetske živosti z lastno estetiko, inteligenco in gibanjem.
Produkcija: Zavod Kersnikova – Galerija Kapelica | konS ≡ Platforma za sodobno raziskovalno umetnost
Kurator: Jurij Krpan
Bioinženiring: Kristijan Tkalec, BioTehna Lab; prof. dr. Helena H. Chowdhury, Laboratorij za endokrinologijo – molekularna celična fiziologija, Medicinska fakulteta, UL
Strokovna pomoč: znan. sod. dr. Martina Perše, Medicinski eksperimentalni center, Medicinska fakulteta, UL
Programiranje AI: Benjamin Fele
Biosenzorna elektronika, programiranje: Erik Krkač
Elektronika, PCB oblikovanje: Gregor Krpič
Meritve: Jakob Grčman
3D oblikovanje: Cveto Kuneševič